Research and study
ITS Industry Trend Survey
JARI, sucessor to the Association of Electronic Technology for Automobiles, in seeking applications for ITS, autonomous driving, and new mobility technology, investigates the latest trends in technology and industry, identifies challenges, and makes proposals and disseminates information to resolve these challenges.
This report is based on the findings obtained through surveys and interviews conducted with the cooperation of ITS-related ministries, organizations, and companies, as well as our own analysis, and is intended to provide a broad range of stakeholders and the general public with information on future directions.
With the evolution of ICT and the aging of society, the public and private sectors are actively developing technologies for the practical application of autonomous driving vehicles and information technology.
In addition to solving technological issues, it is essential to consider new urban forms and mobility services, and to foster social acceptance of such services.
The survey introduces the knowledge gained through exchanges of opinions with various experts across industries, and its contents, which cover all aspects of ITS, as well as its frank recommendations for the realization of ITS, have been highly evaluated and are being utilized in a number of areas.
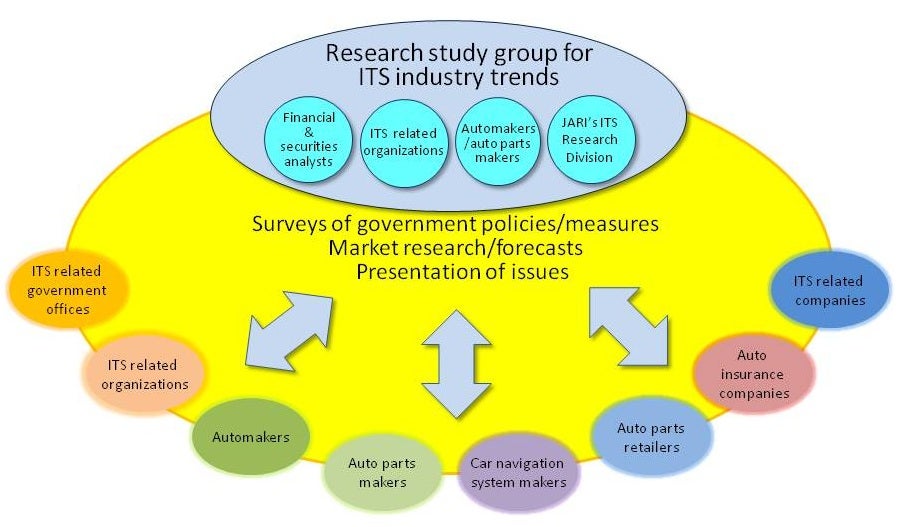
ITS Industry Trends Research Study Group Activities
Research Survey on the Forms of Regional Continuous Mobility
We are engaged in basic research to identify the conditions for establishing a social system that flexibly manages a community in order to ensure continued habitation in a small, marginal village.
Specifically, we are surveying various stakeholders, including the providers of basic infrastructure such as transportation and logistics operated by the government and private sector, and public services such as medical, health, and welfare services, as well as residents, to determine the considerations and provisions necessary to maintain and guarantee that social system.
At the same time, we will make proposals for town development and transportation policies that will ensure continuity by utilizing the region's wide variety of resources.
Recognition and Decision-Making Technology
Driving is achieved through a process of recognition, decision-making, and operation by the driver. For automated driving systems, the automated driving system must recognize, decide, and operate using input information from peripheral recognition sensors such as cameras, laser radar, and millimeter wave radar.
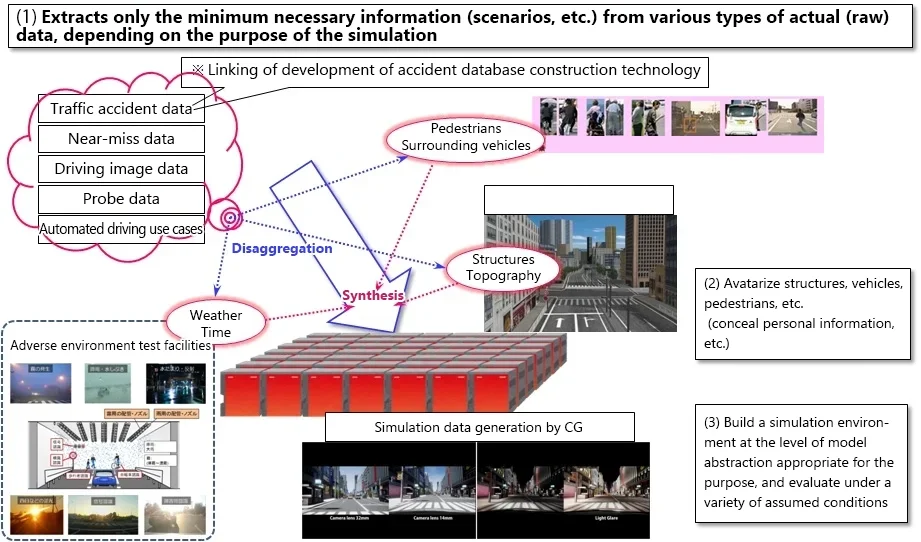
In order to improve recognition performance of pedestrians and bicycles around vehicles, it is necessary to collect sensor data by driving in various driving scenarios in different seasons and at different times of the day, as well as in adverse environments such as rain and fog, and conduct simulation evaluations. Since the development of such a database is a difficult task for those involved in the development process, we are building an easy-to-use database that can be used in common by all parties involved and that allows instantaneous searches of the necessary driving scenarios from a large amount of data.
In addition, to develop high-performance recognition and decision-making algorithms, it is necessary to input and simulate a large amount of peripheral recognition sensor data under adverse environmental conditions, such as backlighting from the setting sun in the west, reflection from water puddles, and fog.However, the amount of sensor data actually collected is very small, and it is difficult to collect data on various scenarios. Therefore, we are also considering the construction of a virtual evaluation environment through the use of computer graphics (CG) to create virtual scenarios based on the collected data and generate simulation data with CG.
Research and demonstration project for recognition and decision-making database
Safety Design Technology
In driver assistance systems (SAE Level 1 and 2), which are already in the practical application phase, the driver always has driving authority, including the duty to monitor the surrounding area. Meanwhile, in the automated driving systems (SAE level 3 and above) envisioned for the future, the system has the driving authority, including the duty to monitor the surroundings (at least until the system delegates the driving authority to the driver).Compared to the former, the latter requires a much higher level of functionality, performance, and responsibility to be assumed by the system. Thus, there is an increased need for safety design technology that can reliably guarantee safety even in emergency situations (e.g., failures, performance limitations, misuse, driver malfunction, and security breaches).
In order to improve recognition performance of pedestrians and bicycles around vehicles, it is necessary to collect sensor data by driving in various driving scenarios in different seasons and times of the day, as well as in adverse environments such as rain and fog, and conduct simulation evaluations. Since the development of such a database is a difficult task for those involved in the development process, we are building an easy-to-use database that can be used in common by all parties involved and that allows instantaneous searches of the necessary driving scenarios from a large amount of data.
In order to promote the early commercialization of automated driving systems (SAE Level 3 and 4), we believe it is necessary to share the basic thinking that goes into safety design and verification evaluation. With this background and purpose, we have been working on a project commissioned by METI (Ministry of Economy, Trade and Industry) since 2014 (the development of safety design technology) with a team collaboration between industry and academia. Specifically, the following four main tasks are being addressed.
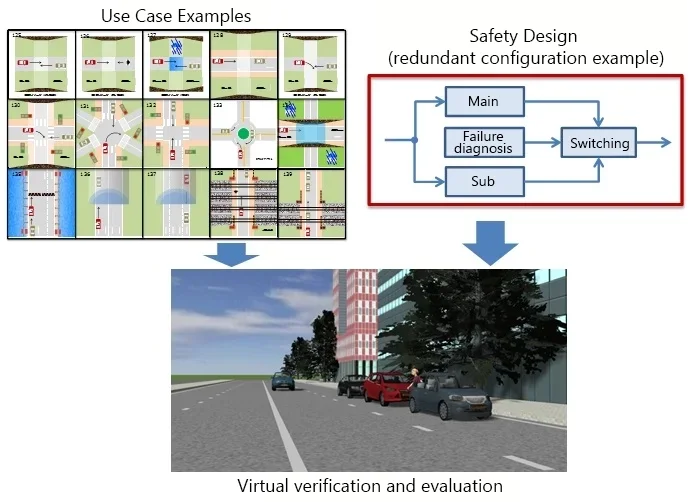
- Organizing and Systematizing Use Cases
The use of automated driving systems (SAE Level 3 and 4) is comprehensively organized and systematized as use cases. The system is intended to be used not only for verification and evaluation of safety design, but also for various other purposes. - Functional safety fail-operational (FOP) design aware failures
Instead of conventional fail-safe (output stops in the event of a failure), fail-operational (functions continue or are reduced even in the event of a failure) is required. We are working on a steering control system as an example. - Safety Design Based on Performance Limitations (Basic Research)
Unlike accidental failures, which have a low probability of occurrence, performance limitations occur frequently when the surrounding conditions are right. We are working on an example of a sensor recognition system to ensure safe design even when performance limitations occur. - Safety Design Based on Misuse (Basic Research)
There is misuse (use that differs from the designer's intention) and misoperation (intention to use the product correctly but misoperation as a result). We are tackling the latter challenge using a steering control system as an example.
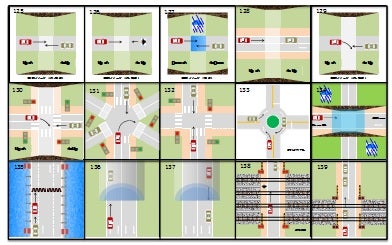
Use Case Diagram (examples)
Organizing and Systematizing Use Cases
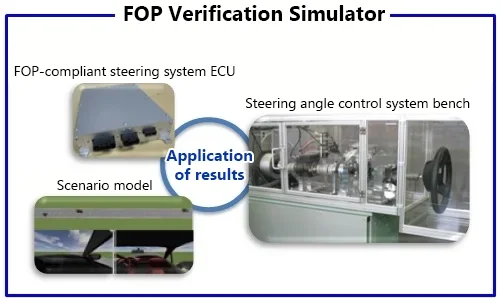
FOP verification environment tied to use cases
Security
In automobiles, GPS, keyless entry, and other devices are already connected externally via wireless communications, and the communications used for these devices are expanding to include V2X (Vehicle to Everything: vehicle-to-vehicle, infrastructure, etc.), cellular telecommunications, WiFi/Bluetooth, and various other types of wireless communications. In particular, in automated driving systems, it is expected that information obtained through wireless communication will also be used for driving control, so it is important that the information is accurate.
In addition, as automobiles become more connected to the outside world such as with the Internet, the IT industry, for example, will be required to ensure security, which is an issue for computers, etc., in the same way that it is for automobiles. In fact, automobile security is now the focus of attention, as cases of automobile hacking were reported at BlackHat, an international security-related conference, and some of them led to recalls.
JARI's research on automobile security is mainly focused on the development of evaluation methods and evaluation criteria, and while the IT industry is also known for its multi-layered security measures, it is common with automobiles to also consider measures divided into layers.At JARI, research is mainly focused on security technology at the second level and below, i.e., inside the vehicle.
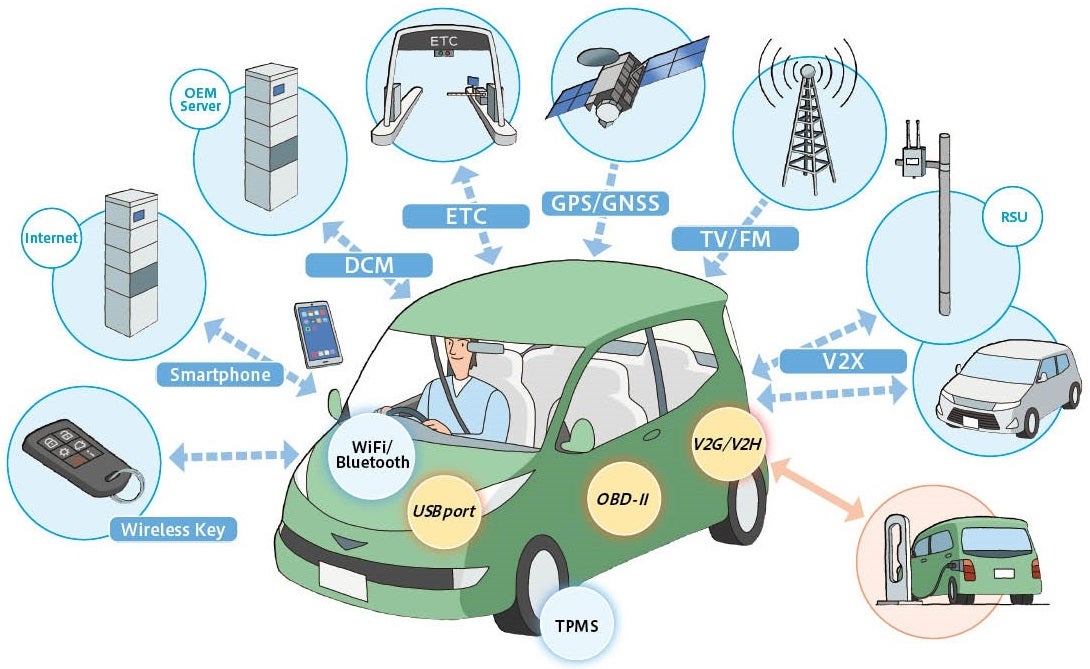
External wireless communications in automobiles
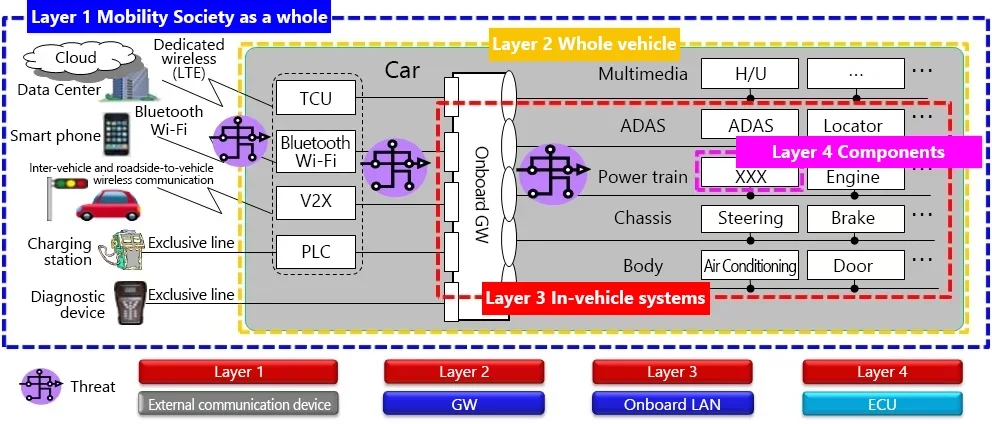
Layered approach to security measures
Purpose of developing an accident reduction effect simulation
In order to quickly put automated driving systems to practical use and expand their use, it is necessary to appeal to society about the accident reduction effects of such systems when they are put to practical use. To achieve this, it is necessary to reproduce the real traffic environment and traffic accidents through computer simulations, and to quantitatively evaluate the accident reduction effects of an automated driving system.
There are two main types of simulations that reproduce traffic accidents: the microscopic accident scene-specific type that realistically reproduces the actual accident scene in detail, and the macroscopic traffic environment type that reproduces real traffic phenomena over a wide area and targets various accidents that occur there.
Simulation Development
JARI is working on the development of a traffic environment reproduction type simulation that can reproduce the traffic behavior and accidents of various traffic components.
In order to reproduce a realistic traffic environment, it is necessary to construct a system in which traffic components, such as drivers and pedestrians, become the entities that autonomously perform a series of actions, such as recognition, decision-making, and operation, respectively, and influence each other's actions, and in which an accident occurs when a traffic component makes an occasional error.It has been reported that the majority of accidents are caused by the errors of traffic components. In order to improve the prediction accuracy of the accident reduction effectiveness, it is both an important and difficult task to develop behavioral models of drivers, pedestrians, and others that can simulate the characteristics of human errors that the actual accident conditions indicate.
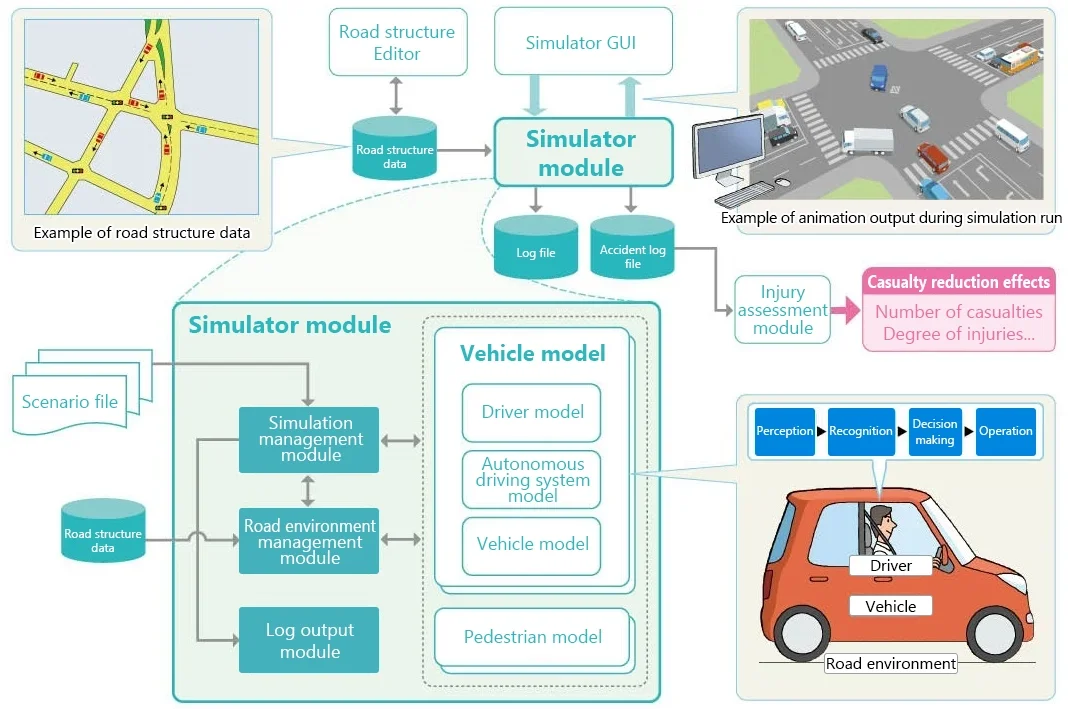
Overall structure of accident reduction effect simulation