自動運転・運転支援
人、車、道(交通環境)の各観点から事故発生要因を分析し、事故防止対策や適切な運転支援のあり方について研究しています。また近年、交通事故削減のみならず、渋滞緩和や運転手不足への対応などにおいても社会的期待が高い、自動運転の研究にも注力しています。JARIでは、より高度に安全で円滑な移動を実現するための、自動運転システムや運転支援システムに係る安全性評価手法開発も行っています。
交通事故発生メカニズム
交通事故統計、事故調査データやドライブレコーダによるニアミス事例データを活用し、交通事故の背景要因や発生シナリオについて分析しています。また、典型的な事故/ニアミス発生場面をJtown V2X市街地、多目的市街地等で再現し、事故の発生メカニズムを実証的に検討するなど、効果的な予防安全対策の研究に取り組んでいます。
事故発生メカニズム研究
大半の交通事故には、運転者のエラー(ヒューマンエラー)が関わっていると言われています。
Jtown V2X市街地、多目的市街地などでの危険な交通場面(ニアミス)を再現した走行実験によって、事故に繋がる運転行動パターンや運転者特性を調べることで、事故発生メカニズムの解明に取り組んでいます。

車両対歩行者ニアミスの再現実験
運転者特性
緊急事態が発生したときの運転者の回避能力や、通常の交通状況での運転特性研究を進めています。個人差が拡大する高齢ドライバの特徴をよりよく理解するための試みとして、運転行動パターンの分類等を行っています。
ドライバ特性研究
自動車を運転するという行動は、ドライバの認知、判断、操作の連鎖から構成されています。
ドライバが交通環境を認知するための視覚探索機能、人間の情報処理能力、緊急状況での危険回避操作などの研究に取り組んでいます。
高齢ドライバ研究
高齢化の進展とともに社会的な課題となっている高齢ドライバの安全対策について、運転特性の把握や支援効果の検討といった人間工学面での様々な実験、研究を実施しています。

高齢ドライバによる実車走行実験
緑内障患者の運転時の注視行動に関する研究
視野障害を有する緑内障ドライバの運転への注意の払い方について、様々な交通場面をドライビングシミュレータで再現して調べています。その結果、歩行者が横断する直前のドライバの眼球運動の程度と、衝突有無やブレーキ反応時間に関係性が示されました。
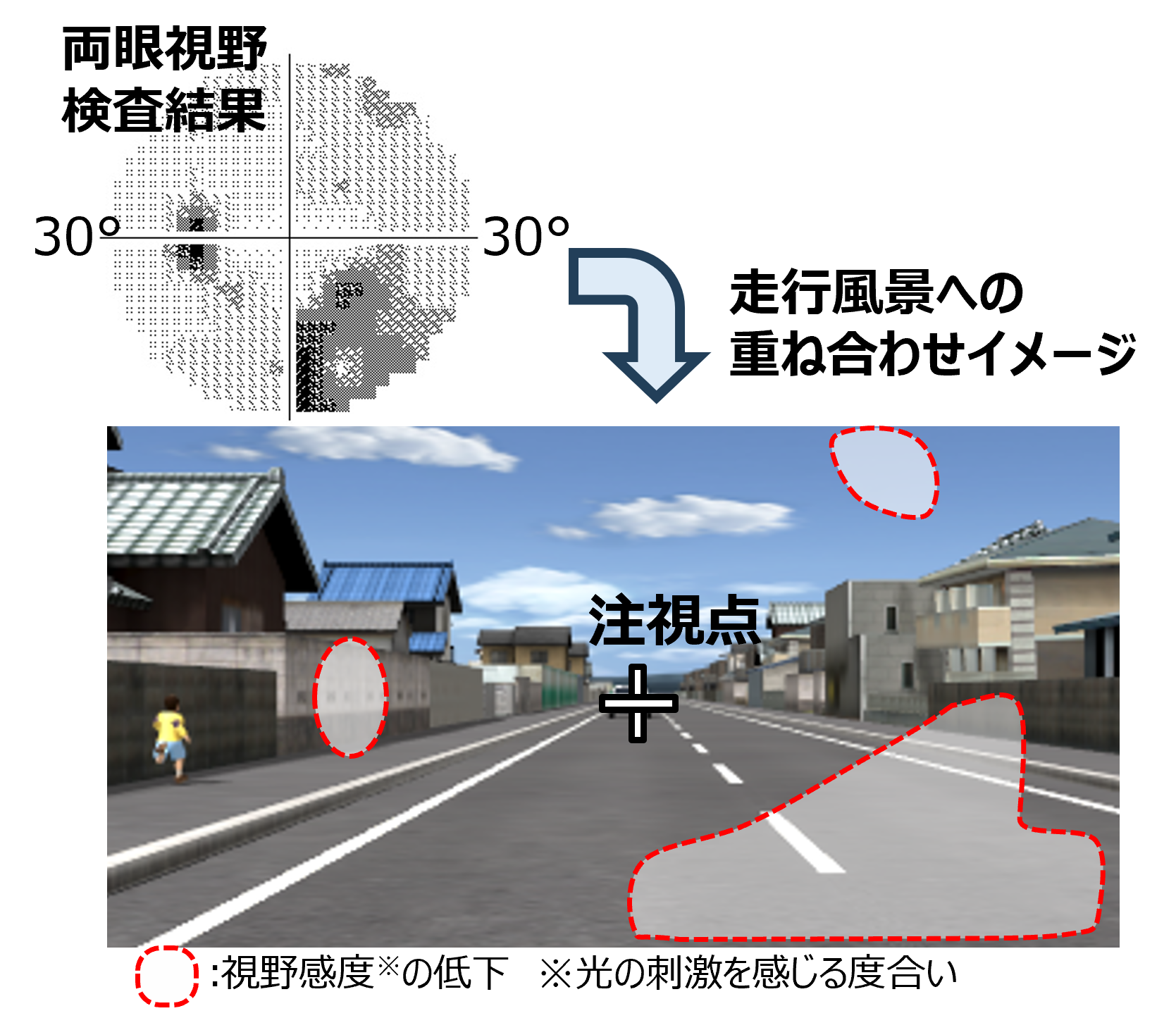
緑内障の症状イメージ
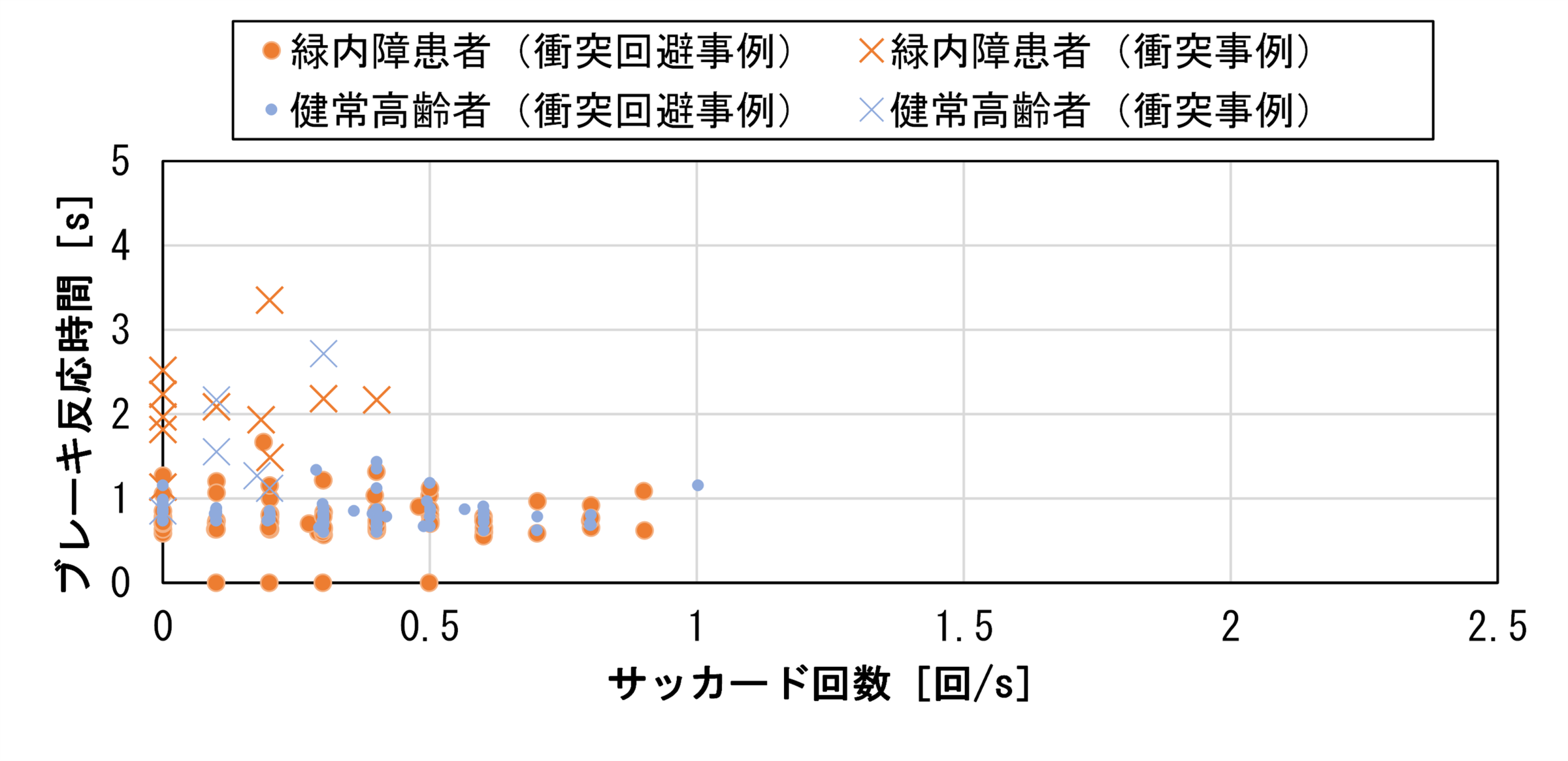
眼球運転とブレーキ反応時間との関係一例
運転支援システム研究
ドライバインターフェイス
ドライバに対して情報を提示することが常に効果的であるとは限りません。情報を提示する内容・タイミングによっては、かえって運転行動を阻害する可能性があります。そこで、ドライバが普段は無意識に運転している状況に経路を詳細に指定するような指示を加えたときの影響を調べています。
![(画像の説明文:たとえば[サンプル画像]など)](https://img.jari.or.jp/v=1710307619/files/user/research/driver_interface3.png)
ドライバに走行経路を意識させた場合の影響を調べる実車実験
性能評価試験法研究
ドライバのうっかりミスをカバーしたり、運転操作の負担を減らすための装置として、数々の運転支援システムが実用化されています。衝突被害軽減ブレーキをはじめとする各種運転支援システムの性能評価に関わる様々な実験、研究を実施しています。
![(画像の説明文:たとえば[サンプル画像]など)](https://img.jari.or.jp/v=1710307965/files/user/research/emergency_brake4.png)
衝突被害軽減ブレーキ(交差点での右折直進場面)の実験
自動運転システム
今後、自動運転システムの社会実装を促進する上で、システムの安全性やドライバの受容性をいかにして確保するかが重要な課題となります。そのための知見獲得に向けて、JARIは、システムの安全性を評価する手法の開発や人とシステムとの相互作用に関する研究に取り組んでいます。
安全性評価手法研究:自動運転が安全を確保すべき範囲を特定する手法
自動運転の安全性を評価するためには合理的に予見可能な範囲を特定する必要があります。実際の交通流・ヒヤリハット・事故などのデータに基づいて特定する手法を提案しています。
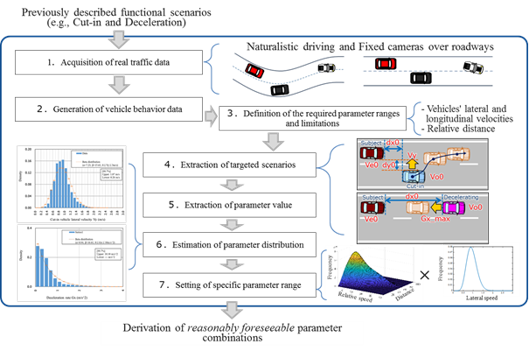
合理的予見可能性を特定する手法
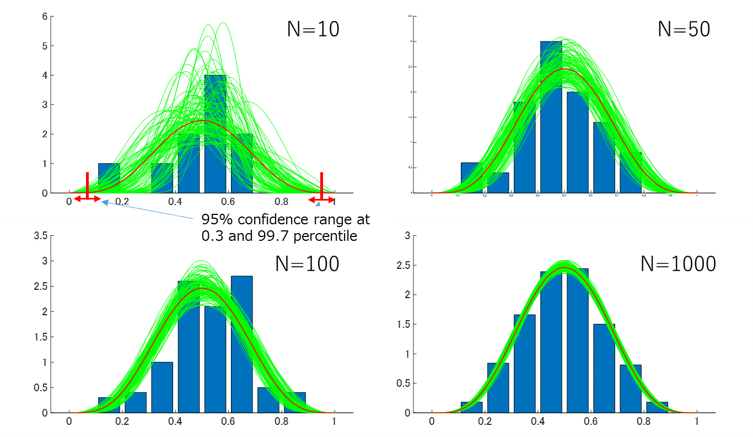
データ件数と推定結果の信頼性の関係
安全性評価手法研究:安全性評価の範囲を決めるデータの収集(計測車両)
自動運転の安全性評価に向けては、合理的に予見可能な範囲を特定するための実交通流データが必要になります。様々なセンサを搭載した計測車両を使用して、実交通流データの収集を行っています。
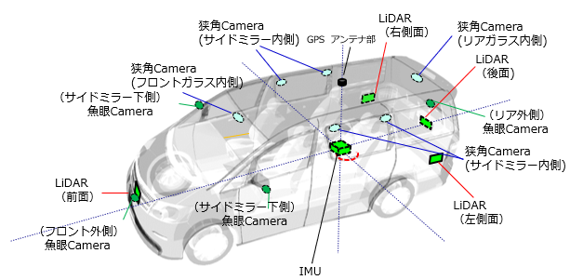
計測車両のセンサ搭載構成
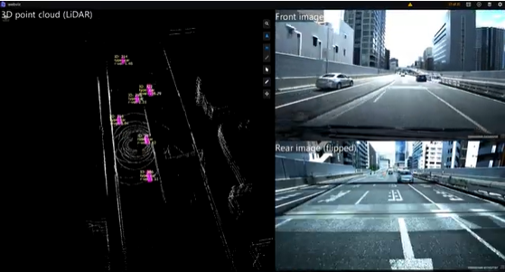
計測車両によるデータ収集例
安全性評価手法研究:安全性評価の範囲を決めるデータの収集(定点カメラ)
合流路など特定の道路構造や場所における自然な実交通流データを効率的に収集するため、定点カメラ観測によるデータ収集を行っています。画像処理により車両軌跡データを抽出して分析に利用します。
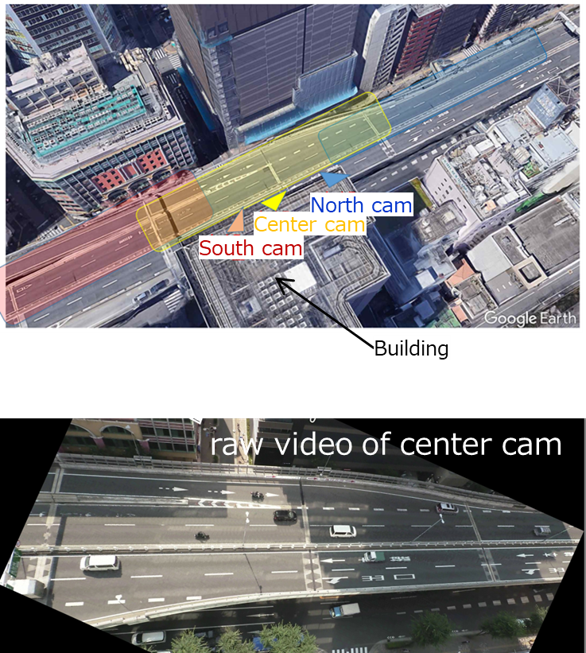
ビル屋上からの定点観測例(首都高速道IC)
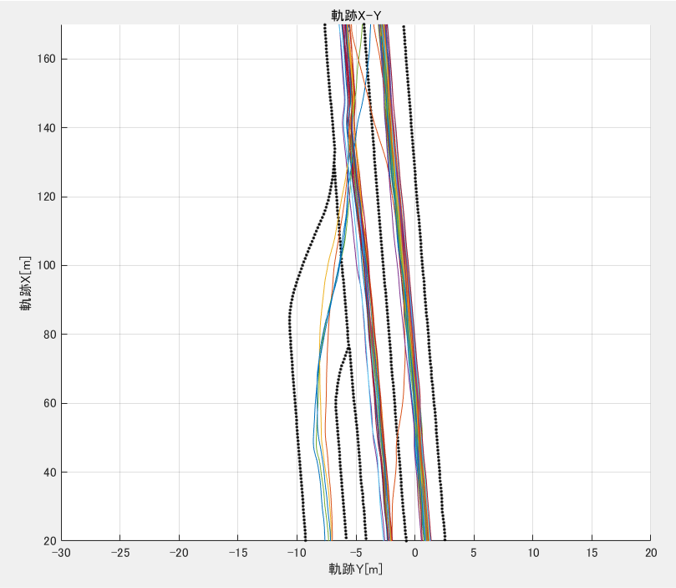
車両軌跡の例(首都高速道IC、2分間の重ね書き)
安全性評価手法研究:ヒューマンドライバと比べて安全性を判断する手法
自動運転の安全性を評価するためには、防止可能な範囲を特定する必要があります。社会受容性の高い比較対象として、注意深く有能なドライバの回避行動のモデル化を行っています。
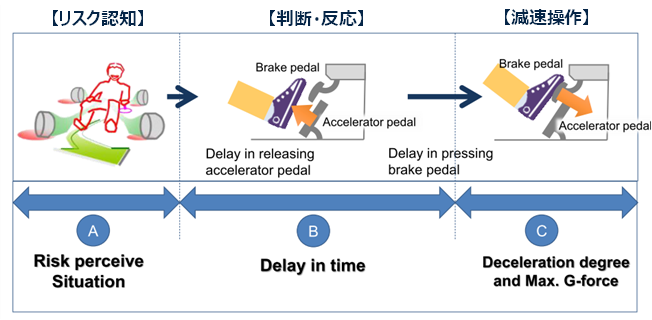
ドライバの回避行動の流れ
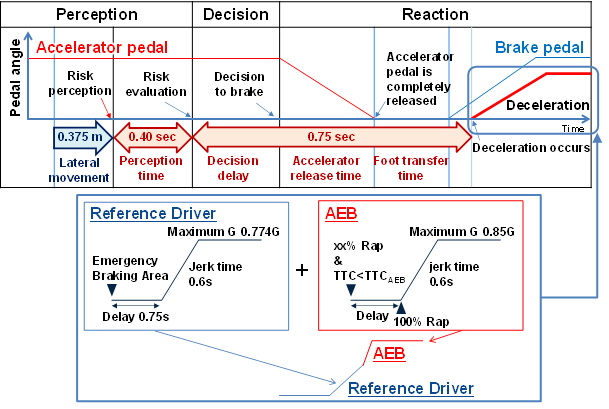
注意深く有能なドライバの回避行動モデル
ドライバ受容性研究:自動運転の振る舞い方とドライバ受容性との関係調査
自動運転の普及促進を図る上では、自動運転システムに対するドライバの受容性を高めることが重要です。一般道での停止車両の追い越し場面をドライビングシミュレータ上に模擬し、自動運転システムの振る舞いの違いとドライバの受容性との関係を調べています。

システムの振る舞いに関する情報提示例
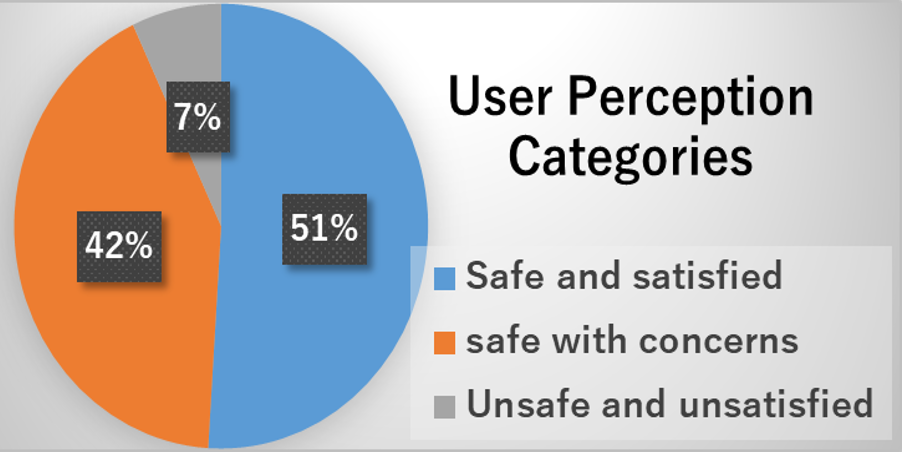
受容性結果の一例
ドライバ受容性研究:ドライバの感情状態に着目した運転行動分析
レベル3の自動運転中は、車内でのメディア視聴など運転以外の行動が可能となりますが、運転引き継ぎが要請された場合には、手動での運転に引き継ぐことが必要です。メディア視聴などは、覚醒度や感情状態(快・不快)の変化を誘発する可能性がありますが、安全運転のためには、感情状態のバランスが重要であることが知られています。基礎的な調査として、特にドライバの感情状態と運転引き継ぎとの関係について着目しています。
![(画像の説明文:たとえば[サンプル画像]など)](https://img.jari.or.jp/v=1710743312/files/user/research/social acceptance15.png)
快・不快状態と運転引き継ぎパフォーマンスとの関係
